기타
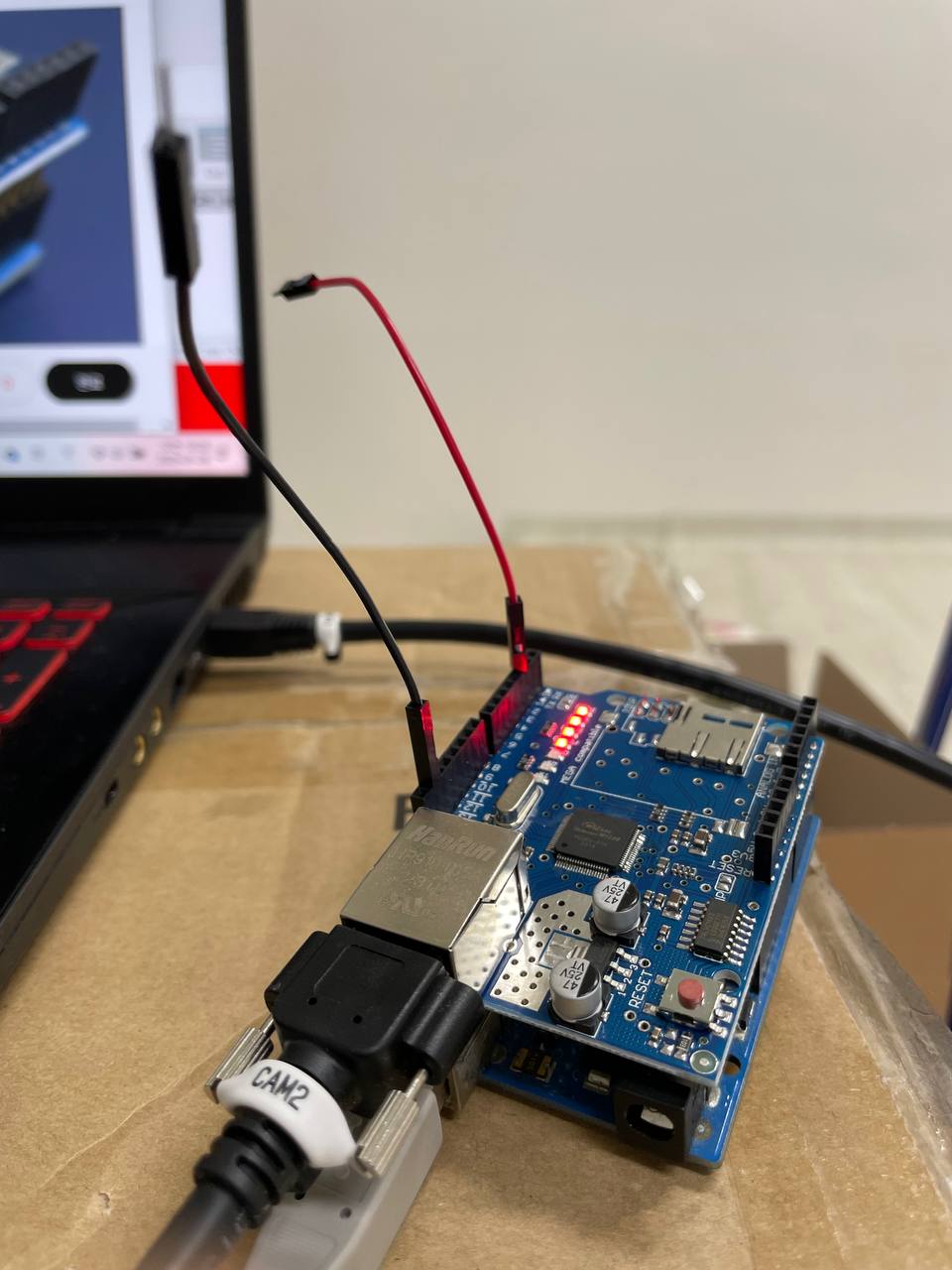
ArduinoPLC <-> PC 간 UDP 통신 OK
제갈티
2025. 1. 9. 13:03
#include <SPI.h>
#include <Ethernet.h>
#include <EthernetUdp.h>
// MAC 주소 설정
byte mac[] = { 0xDE, 0xAD, 0xBE, 0xEF, 0xFE, 0xED };
IPAddress ip(192, 168, 0, 177);
unsigned int localPort = 8888;
// PLC 입력 설정
const int inputPin = 2; // X0 입력 접점
word X0_status = 0; // 입력 상태
word prev_X0_status = 0; // 이전 입력 상태
EthernetUDP Udp;
void setup() {
Serial.begin(9600);
Serial.println("Starting PLC Simulation...");
pinMode(inputPin, INPUT_PULLUP); // PLC 입력 설정
// 이더넷 초기화
Ethernet.begin(mac, ip);
Udp.begin(localPort);
if (Ethernet.hardwareStatus() == EthernetNoHardware) {
Serial.println("Ethernet shield not found!");
while (true) delay(1);
}
Serial.println("PLC Ready!");
}
void loop() {
// 입력 상태 읽기
X0_status = !digitalRead(inputPin); // Pull-up 저항으로 인해 반전
// 상태 변경 감지
if (X0_status != prev_X0_status) {
// 상태가 변경되면 UDP로 전송
Udp.beginPacket(IPAddress(192, 168, 0, 51), 8888);
Udp.write((byte*)&X0_status, sizeof(word));
Udp.endPacket();
Serial.print("Input Status Changed: ");
Serial.println(X0_status);
prev_X0_status = X0_status;
}
delay(10); // 디바운싱
}- 아두이노 코드
import sys
import socket
import struct
from PyQt5.QtWidgets import QApplication, QMainWindow, QWidget
from PyQt5.QtCore import QTimer
from PyQt5.QtGui import QPalette, QColor
class PLCMonitor(QMainWindow):
def __init__(self):
super().__init__()
self.initUI()
self.initUDP()
def initUI(self):
self.setGeometry(100, 100, 400, 300)
self.setWindowTitle('PLC Input Monitor')
# 중앙 위젯 설정
central_widget = QWidget()
self.setCentralWidget(central_widget)
# 초기 색상 설정
self.current_color = 0 # 0: 흰색, 1: 빨간색
self.updateColor()
def initUDP(self):
try:
self.sock = socket.socket(socket.AF_INET, socket.SOCK_DGRAM)
self.sock.bind(('192.168.0.51', 8888))
self.sock.setblocking(False)
print("UDP 소켓 생성 성공!")
# 데이터 수신 타이머
self.timer = QTimer()
self.timer.timeout.connect(self.readPLCInput)
self.timer.start(50) # 50ms마다 확인
except Exception as e:
print(f"소켓 생성 오류: {str(e)}")
def readPLCInput(self):
try:
data, addr = self.sock.recvfrom(1024)
if len(data) >= 2:
x0_status = struct.unpack('H', data[:2])[0]
print(f"받은 입력 상태: {x0_status}")
# 입력 상태에 따라 색상 변경
self.current_color = x0_status
self.updateColor()
except BlockingIOError:
pass
except Exception as e:
print(f"데이터 읽기 오류: {str(e)}")
def updateColor(self):
palette = self.centralWidget().palette()
if self.current_color == 0:
palette.setColor(QPalette.Window, QColor('white'))
print("색상 변경: 흰색")
else:
palette.setColor(QPalette.Window, QColor('red'))
print("색상 변경: 빨간색")
self.centralWidget().setAutoFillBackground(True)
self.centralWidget().setPalette(palette)
def closeEvent(self, event):
if hasattr(self, 'sock'):
self.sock.close()
event.accept()
if __name__ == '__main__':
app = QApplication(sys.argv)
window = PLCMonitor()
window.show()
sys.exit(app.exec_())- 파이썬 코드